


Autonomy with regard to an Attribute
Autonomy is a typical example of what we have called a quality. Indeed, autonomy characteristics seem difficult to be synthesized with only one theory or model. In fact, reducing autonomy to a single model removes the essence of this property. This is why many types of autonomy were proposed by researchers in the Artificial Intelligence area such as the organic autonomy of biological inspiration (Varela), social autonomy based on the power relationships between agents (Castelfranchi, Scerri) or the decisional autonomy founded on the choice of the agent (Barber, Vendryès).
The autonomy with regard to an attribute is a model of decisional autonomy. It is stated in the following way: an agent is autonomous with regard to an attribute A if it can choose in a nondeterministic way a policy of use P among several and if it can change it during its execution time.
An attribute corresponds to a simple and non ambiguous property of an agent like mobility. A policy of use means in our context a succession of actions which carries out a particular and well identified functioning mode related to an attribute. For the mobility attribute, two examples of migration policies are the navigation according to a route (the site of arrival is different from the starting site) and the circular navigation (the site of arrival is the starting site).
Two elements characterize autonomy with regard to an attribute:
- A set of operating modes of this attribute called use policies.
- A two-component choice module.
The module of choice splits up into two parts: a deterministic component and a nondeterministic component.
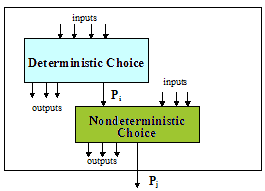
Choice Module
The deterministic part of the choice module is provided with N functioning policies Pi (1<=i<=N, N>1).
With the mobility example, migration policies could be the ones previously presented.
The nondeterministic part includes an additional policy P0 corresponding to the empty policy.
When this one is elected, no policy is triggered by the agent. It models the situation where, although the choice module
of an attribute A was activated, no policy of A is started: there is an inhibition of the policy resulting from the deterministic choice.
It is to be noticed that after the activation of the nondeterministic part of the choice module, the policy Pj (0<=j<=N)
finally elected and executed can be different from the policy Pi previously selected by the deterministic component.
Each part of the choice module has its own utility. The presence of the deterministic module of choice provides the agent with a
coherent behaviour (rational choice) directed by the conditions of inputs. The nondeterministic module of choice ensures the agent
the decoupling between its freedom (autonomy) and its control (command). It protects the agent from
all recurring forms of explicit or implicit command.
If the agent included only the deterministic choice, it would be a simple program. If the nondeterministic choice were
only present, the agent would be condemned to a chaotic functioning.
By the combination of the two components of the choice module, the autonomy with regard to an attribute combines rationality and non determinism.
The last condition for the agent to be autonomous with regard to an attribute is that its internal functioning enables it to activate the choice module more than once. Indeed, if in its lifespan the agent chose a use policy of an attribute and then stopped, it could not be considered as autonomous with regard to this attribute.
Tested within the framework of distributed applications using mobile agents, this model of autonomy seems also appropriate to other fields of research such as the design of synthetic personalities or autonomic systems.

 +33 (0)5.65.77.10.80
+33 (0)5.65.77.10.80
