


Autonomie par rapport à un attribut
L’autonomie est un exemple idéel de ce que nous avons appelé une qualité. En effet, l’autonomie semble difficile à synthétiser au moyen d’une seule théorie ou modèle. En fait, réduire l’autonomie à un modèle unique, c’est faire disparaître l’essence de cette propriété. C’est la raison pour laquelle de nombreux types d’autonomie ont été proposés par les chercheurs en Intelligence Artificielle tels que l'autonomie organique d’inspiration biologique (Varela), l'autonomie sociale basée sur les rapports de pouvoir entre agents (Castelfranchi, Scerri) ou l'autonomie décisionnelle fondée sur le choix de l'agent (Barber, Vendryès).
L’autonomie par rapport à un attribut est une autonomie décisionnelle. Elle s’énonce de la manière suivante : un agent est autonome par rapport à un attribut A s'il peut choisir de manière non déterministe une politique d'utilisation P parmi plusieurs et s'il peut en changer pendant sa durée d'exécution.
Un attribut correspond à une propriété simple, non ambiguë d’un agent comme par exemple la mobilité. Une politique d’utilisation signifie dans notre contexte une suite d’actions qui réalise un mode de fonctionnement particulier et bien identifié relatif à un attribut. Dans le cadre de la mobilité, deux exemples de politiques de déplacement sont la navigation suivant un itinéraire (le site d'arrivée est différent du site de départ) et la navigation circulaire (le site d'arrivée est le site de départ).
Deux éléments caractérisent l'autonomie par rapport à un attribut :
- un ensemble de modes de fonctionnement de l’attribut, également appelés politiques d’utilisation ;
- un module de choix à double composante.
Le module de choix se décompose en deux parties : une composante déterministe et une composante non déterministe.
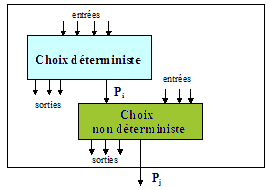
Module de choix
La partie déterministe du module de choix est munie de N politiques de fonctionnement Pi (1<=i<=N, N>1).
Pour la mobilité, il pourra s’agir, entre autres, des politiques de déplacement mentionnées précédemment.
La partie non déterministe comprend une politique supplémentaire notée P0 correspondant à la politique vide.
Lorsque celle-ci est élue, aucune politique n’est déclenchée par l’agent. Cela modélise la situation où,
bien que le module de choix d’un attribut A ait été activé, cela ne déclenche aucune politique de A : il y a inhibition
de la politique issue du choix déterministe. Il est à remarquer qu’après activation de la partie non déterministe
du module de choix, la politique Pj (0<=j<=N) finalement élue et exécutée peut être différente de
la politique Pi sélectionnée par la composante déterministe.
Chaque partie du module de choix a sa propre utilité. La présence du module de choix déterministe munit l’agent
d’un comportement cohérent (choix rationnel) dirigé par les conditions d’entrées. Le module de choix non
déterministe assure à l’agent le découplage entre sa liberté (autonomie) et son contrôle (commande).
Il prévient l'agent de toutes formes récurrentes de commande explicite ou implicite.
Si l’agent n’incluait que le choix déterministe, ce serait un simple programme. Si le choix non déterministe était
seul présent, l’agent serait condamné à un fonctionnement chaotique. Par la combinaison des deux composantes du module
de choix, l’autonomie par rapport à un attribut marie rationalité et aléatoire.
La dernière condition pour que l’agent soit autonome par rapport à un attribut est que son fonctionnement interne lui permette d’activer le module de choix plus d’une fois. En effet, si dans sa durée de vie l’agent choisissait une politique d’utilisation d’un attribut puis se terminait, il ne pourrait être considéré comme autonome par rapport à cet attribut.
Expérimenté dans le cadre d’applications réparties à agents mobiles, ce modèle d’autonomie semble également approprié à d’autres domaines de recherche tels que la conception de personnalités synthétiques ou les systèmes /applications autonomiques.
 Retour aux thèmes de recherche de l'équipe ARAL
Retour aux thèmes de recherche de l'équipe ARAL
 +33 (0)5.65.77.10.80
+33 (0)5.65.77.10.80
